Der Roboter pib entsteht – Herausforderungen als Chance im Seminar pib@fau
Das Seminar pib@fau bot uns Studierenden eine spannende Aufgabe: Den Roboter pib, der normalerweise in Schulen eingesetzt wird, zu drucken, zu bauen und zu entwickeln. Dabei zeigte sich schnell, dass es nicht nur darum ging, technische Hürden zu meistern – sondern auch, um den Zusammenhalt unter den Studierenden zu stärken. Im Folgenden werden die Erfahrungen des Entwicklerinnen-Teams geschildert.
Der erste Schritt: Die Installation des Betriebssystems
Den Raspberry Pi, das Herzstück des Roboters, mit dem richtigen Betriebssystem auszustatten, war die erste Herausforderung. Unterschiedliche Anleitungen empfahlen verschiedene Systeme: Raspberry Pi OS oder Ubuntu Desktop? Nach einigem Ausprobieren wurde klar, dass Ubuntu Desktop die richtige Wahl für den Roboter pib war und obwohl einige Zeit für Neuinstallationen aufgewendet werden musste, gelang es uns letztendlich, diesen Schritt abzuschließen. Schließlich stellte sich erst einige Zeit später heraus, dass Raspberry Pi OS zur Kalibrierung der Motoren benötigt wurde, weswegen hier noch eine Änderung erfolgt ist.
Zum Leben erweckt: Der Raspberry Pi startet
Mit dem installierten Betriebssystem war unser nächster Meilenstein die Inbetriebnahme des Raspberry Pi. Dabei traten zunächst Probleme auf: Die IP-Adresse wurde nicht angezeigt, Softwaredownloads schlugen fehl, und es kam zu wiederholten Fehlermeldungen. Gemeinsam mit einem Lehrenden konnten wir als Team jedoch eine Lösung finden, sodass die Steuerungssoftware Cerebra einsatzbereit war.
© Regina Friedl, Sahar Moallemian, Jacqueline Siebert, Rike Weimann.

© Regina Friedl, Sahar Moallemian, Jacqueline Siebert, Rike Weimann.
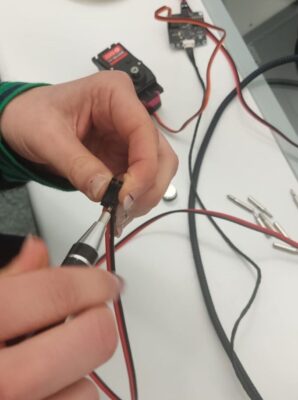
Präzision gefragt: Die Kalibrierung der Motoren
Die Kalibrierung der Motoren ist notwendig, um den Roboter bzw. seine Arme und Hände zu bewegen. Auch hier stießen wir, also das Programmieren-Team, auf Herausforderungen: Die enge Bauweise des Kopfes von pib erschwerte das Anschließen der Kabel massiv. Probleme mit der SD-Karte erschwerten zudem den Prozess. Ein weiterer Stolperstein begegnete uns dabei, eine Verbindung zum Servo Bricklet herzustellen, welchen wir durch den Wechsel von Ubuntu auf Raspberry Pi OS überwinden konnten. Nachdem die Verbindung über den Brick Viewer endlich gelang, konnten wir die Kalibrierung der Motoren gemäß der Anleitung durchführen.
|
Fazit: Ein Projekt mit Mehrwert Das Seminar pib@fau war eine sehr wertvolle Lernerfahrung. Trotz mancher Hindernisse und Fehlschläge haben wir als Team wichtige Kompetenzen mitnehmen können: Problemlösungsstrategien, Teamarbeit und den Umgang mit Rückschlägen. Auch wenn der Roboter pib noch nicht komplett fertig ist, hat uns das Projekt gezeigt, wie man gemeinsam Herausforderungen in Chancen verwandelt. Der Weg zum fertigen pib bleibt weiterhin spannend und wir freuen uns auf das Endergebnis! |
Regina Friedl, Sahar Moallemian, Jacqueline Siebert, Rike Weimann